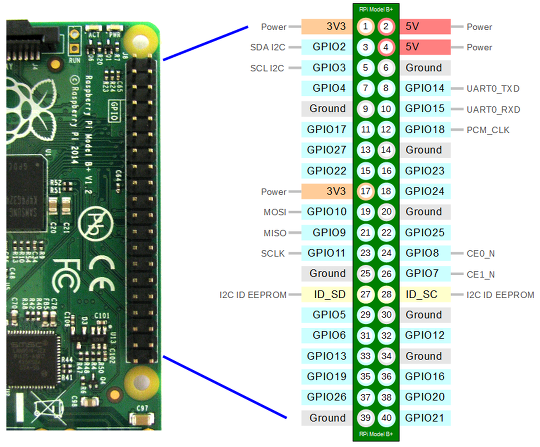
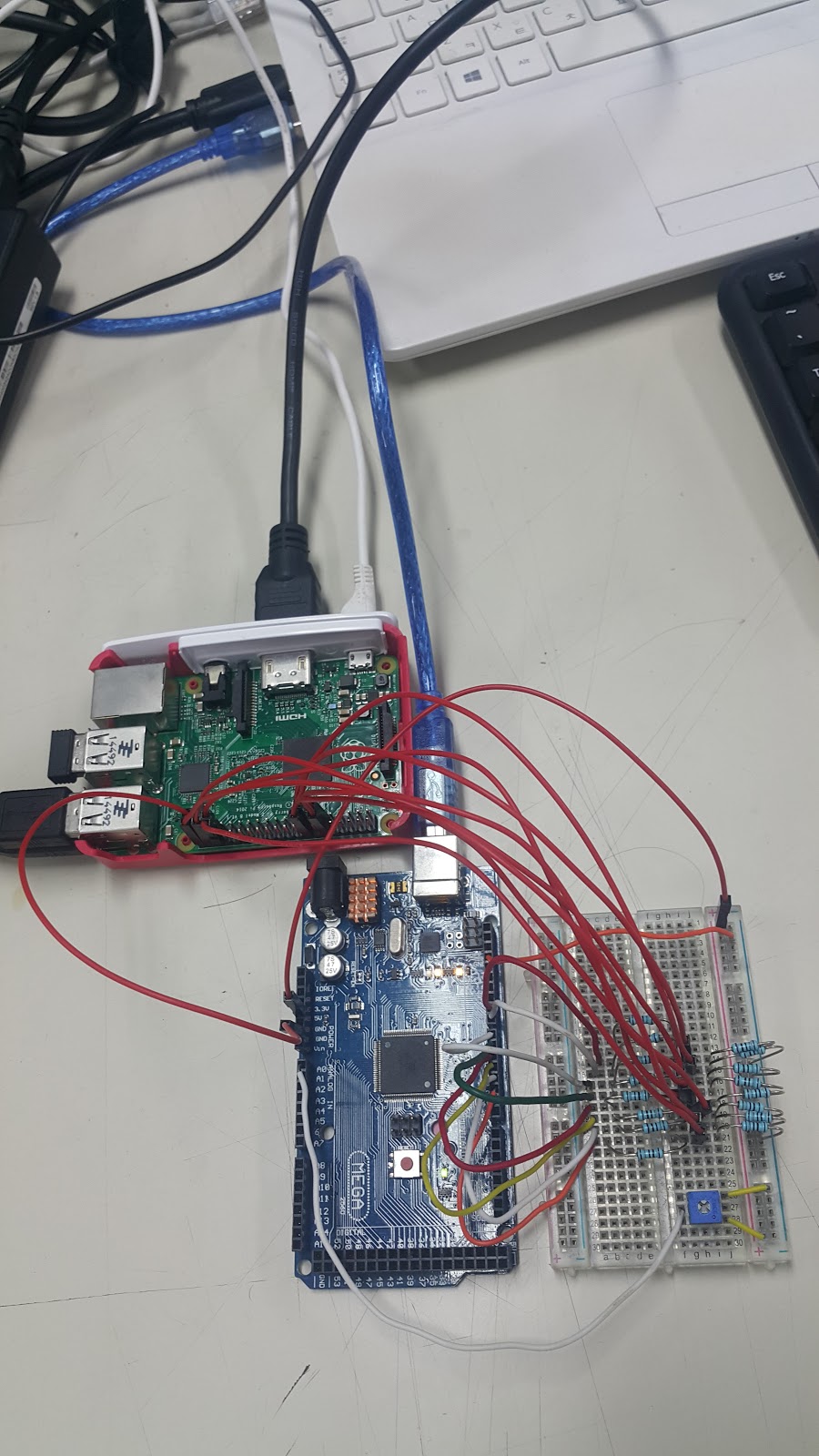
ARM 아키텍처 환경(라즈베리파이)에서 테스트 해보았다.
gcc -o asm asm.c 로 하면 컴파일이 잘 되고 결과도 잘 나옴.
[코드]
#include <stdio.h>int asm_bic_ex ( int x, int y);
asm(" \n\
.global asm_bic_ex \n\
asm_bic_ex: \n\
bic r0, r0, r1 \n\
mov pc, lr \n\
");
int main ( void )
{
int bic;
printf("\n+-------------------+\n");
printf("|ARMInstruction BIC|\n");
printf("+-------------------+\n\n");
bic = asm_bic_ex( 0x1111, 0x1010);
printf("cpsr = %08X\n\n", bic );
return 0;
}
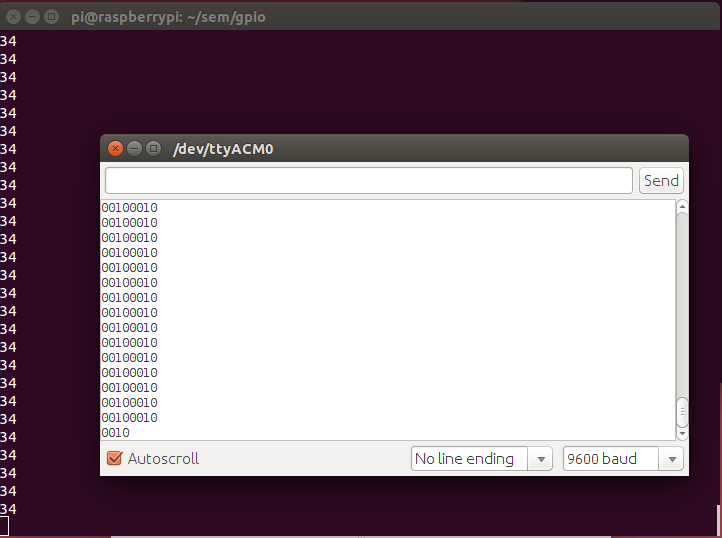
[결과]

출처
ARM 명령어를 배워보자(19) : bic
http://forum.falinux.com/zbxe/index.php?document_srl=572163&mid=lecture_tip